来自当时复习几何学基础的笔记。几何学基础是USTC的一门大一入门课。
几何学基础 - 个人期中复习纲要
upd 20231125:修复大量错误,绷
复习不完了QAQ
\(\mathcal X\) 空间:几何的公理化
欧式几何
- 体系:23个定义、5个公设(postulate)、5个公理(common notion)
- 不足:过度依赖于几何直觉
第五公设
- 原叙述:若一直线与两直线相交,且若同侧所交两内角之和小于两直角,则两直线延长后必相交于该侧的一点.
- 等价叙述(Playfair公理):给定直线外一点,至多能过该点做一直线与所给直线平行性
- 注:存在性可由前四条公设推出(命题28)
希尔伯特(Hilbert)公理
约定:\(\mathcal X\) 为满足希尔伯特公理的空间,其中 \(\mathcal X_3\) 为三维版本,\(\mathcal X_2\) 为二维版本.
体系
两组对象,分别为
- 三个不加定义的本原对象:点、直线、平面
- 涉及这些对象的本原关系:关联、介于、合同
内容
关联公理(8条)
顺序公理(4条)
合同公理(5条)
平行公理
连续公理(2条)
- 阿基米德(Archemedes)公理
- 直线完备公理
示例:垂线的存在唯一性(证明纲要)
先证中点存在,再从中点证垂线唯一、存在.(略)
从 \(\mathcal X\) 到 \(\mathbb E^3\)
向量的定义
方向
两线段 \(AB\),\(A'B'\) 同向的定义为
- \(A=A'\):\(B,B'\) 位于 \(A\) 同侧;
- \(A\neq A'\):\(B,B'\) 位于 \(AA'\) 同侧,且对 \(AA'\) 上一点 \(D\),\(\angle DAB=\angle DA'B'\)(即同位角).
\(\mathcal X\) 上的向量
带有方向的线段称为向量.故 \[ \overrightarrow{AB}=\overrightarrow{A'B'}\stackrel{\text{def}}{\Leftrightarrow}\begin{cases} AB\equiv A'B'\\AB\text{ 与 }A'B' \text{ 方向相同 }\end{cases} \]
引理: \(\overrightarrow{AB}=\overrightarrow{A'B'}\Rightarrow B=B'\)
定义:零向量 \(0:=\overrightarrow{AA}\).
两个基本变换
反射变换
定义
\(\alpha\) 为平面,\(\alpha\) 上的映射 \(R_l:\alpha\to\alpha\),\(A\mapsto R_l(A)\) 为反射变换 \(\stackrel{\text{def}}{\Leftrightarrow}\) \(\overline{AR_l(A)}\bot l\),\(A\) 与 \(R_l(A)\) 到 \(l\) 距离相等
- \(l\) 称为反射轴
- \(R_l(A)\) 称为 \(A\) 关于 \(l\) 的反射点
单个点反射的性质
- \(A\in l\Leftrightarrow R_l(A)\in l\)
- \(R_l(A)=B\Leftrightarrow l\) 为 \(AB\) 中垂线
线段反射性质
\(P,Q\) 关于\(l\) 的反射点为 \(P',Q'\),则
- \(PQ\equiv P'Q'\);
- 在和直线 \(l\) 垂直的直线 \(PP'\) 上取一点 \(D\),使 \(P,P'\) 都位于 \(D\) 点的同 一侧,则 \(\angle DPQ\) 与 \(\angle DP'Q'\) 互补.
平移变换
定义
\(\tau:\mathcal X\to \mathcal X\)为平移变换,当且仅当存在向量 \(v\),对任意 \(P\in X\),有 \(\overrightarrow{P\tau(P)}=v\).
- \(v\) 称为平移向量.
- 等价命题:\(\tau:\mathcal X\to \mathcal X\)为平移变换,当且仅当对任意 \(P,Q\in X\),有\(\overrightarrow{PQ}=\overrightarrow{\tau(P)\tau(Q)}\).
平移变换的性质
- 定理(反射变换与平移变换):\(\alpha_1,\alpha_2\) 为 \(\mathcal X_3\) 上两个平行平面或 \(\mathcal X_2\) 上两个平行直线,则 \(R_{\alpha_1}\circ R_{\alpha_2}\) 为平移变换.
- 定理(平移变换由两点唯一确定):\(P,Q\in\mathcal X\),则存在唯一的平移变换 \(\tau\) 使 \(Q=\tau(P)\).
- 定理:平移变换构成 Abel 群.
\(\mathcal X\) 上的向量空间
记 \(\mathcal V\) 为 \(\mathcal X\) 上的向量集合,\(\mathcal T\) 为 \(\mathcal X\) 上的平移变换集合.
向量的加法群
定理:定义映射 \(\Phi:\mathcal{T}\to\mathcal{V}\),使:\(\Phi(\mathrm{Id})=0\),\(\Phi(r)=\overrightarrow{AB}\Rightarrow\Phi(r^{-1})=\overrightarrow{BA}\),则 \(\Phi\) 为一双射.
定义(向量加法):\(+:\mathcal V^2\to\mathcal V, (u,v)\mapsto\Phi^{-1}(\Phi(u)\circ \Phi(v))\)
由此可验 证\((\mathcal V,+)\) 构成群.
定理(向量加法的三角形法则)
则 \(\Phi: (\mathcal T,\circ)\cong(\mathcal V,+)\) 构成群同构.
向量的数乘
定义
\(\lambda\in \mathbb R\),\(u\in \mathcal V\),定义 \(\lambda u\in \mathcal V\) 为
\(0\),若\(\lambda=0\);
和向量 \(u\) 有相同方向且长度为 \(u\) 的 \(\lambda\) 倍的向量,若 \(\lambda>0\);
注意:我们这里没有定义向量长度,因为我们没有定义 \(\mathcal X\) 上的向量长度.我们只用到了 \(\mathcal X\) 上线段长度比值的定义.
\((-\lambda)(-u)\),若\(\lambda<0\).
性质
- 乘法相容性(数乘结合律):\(\lambda,\mu\in\mathbb R\),\(v\in\mathcal V\),则 \(\lambda(\mu v)=(\lambda\mu)v\)
- 数乘单位元:\(v\in\mathcal V\),则\(1v=v\).
- 第一分配律:关于数的加法,分配律成立.
- 第二分配律:关于向量的加法,分配律成立.
向量空间
基于向量集合 \(V\),赋予加法和数乘的运算系统.其中加法和运算满足:
- \((V,+)\) 构成 Abel 群;
- 数乘满足乘法相容性、数乘单位元存在性、第一分配律和第二分配律.
由定义可知:\(\mathcal V\) 与其上的加法、数乘构成向量空间.
\(\mathcal V\) 上的内积结构
\(\mathcal V\) 上的范数结构
向量的长度
固定一个单位长度,则可赋予每个向量一个长度.得到向量长度函数 \(|\cdot |:\mathcal V\to\mathbb R,\ v\mapsto|v|\).
向量长度的性质
- 正定性:\(\forall v\in\mathcal V\),\(|v|\geqslant 0\),当且仅当 \(v=0\) 时为 \(0\).
- 正齐次性:\(\forall \lambda\in\mathbb R\),\(v\in\mathcal V\),有\(|\lambda v|=|\lambda||v|\).
- 三角不等式:\(\forall u,v\in\mathbb V\),有\(|u+v|\leqslant|u|+|v|\)
范数的定义
满足向量长度性质的映射 \(\|\cdot\|:V\to \mathbb F\) 称为一个范数,这里 \(V\) 是定义在数域 \(\mathbb F\) 上的向量空间.
\(\mathcal V\) 上的内积结构
范数的极化
\(f(u,v)=\dfrac{1}{2}(|u+v|^2-|u|^2-|v|^2)\) 称为范数 \(|\cdot|\) 的极化.
\(\mathcal V\) 上范数极化的性质
正定性:\(f(v,v)\geqslant 0\),当且仅当 \(v=0\) 时取等.
事实上,在 \(\mathcal V\) 上有 \(f(v,v)=|v|^2\).
对称性:\(f(u,v)=f(v,u)\).
双线性性:\(f(u_1+u_2,v)=f(u_1,v)+f(u_2,v)\),\(f(\lambda u,v)=\lambda f(u,v)\).(另一位置同理)
内积的定义
向量空间 \(V\) 上的运算:\(\cdot:V^2\to \mathbb F\),满足正定性、对称性和双线性性,则称 \(\cdot\) 为一个内积.
由上知:极化为\(\mathcal V\)上的一个内积,记作 \(u\cdot v\),\((u,v)\) 或 \(<u,v>\).
内积诱导范数
- \(\cdot\) 为向量空间 \(V\) 上内积 ,则 \(|u|=\sqrt{u\cdot u}\) 为 \(V\) 上的一个范数.
- 对 \(|v|\) 上的范数,存在内积诱导其的充要条件为该范数满足平行四边形法则,即\(|u+v|^2+|u-v|^2=2|u|^2+2|v|^2\).
余弦定理
\[ u\cdot v=|u||v|\cos\theta \]
欧氏空间
单位正交基与坐标映射
\(\mathcal V\) 上的单位正交基
两两正交的三个单位向量.
基于单位正交基的坐标映射函数 \(c(v)\)
设单位正交基 \(\{i,j,k\}\) 取定,则有定理:\(\forall v\in\mathcal V\), \[ v=(v\cdot i)i+(v\cdot j)j+(v\cdot k)k \] 且映射:\(c:\mathcal V\to\mathbb R^3\),\(v\mapsto (v\cdot i,v\cdot j,v\cdot k)\) 为双射.对 \(v\),称 \(c(v)\) 为其坐标表示.
\(\mathbb R^3\) 上的内积空间与 \(\mathbb E^3\) 的建立
\(\mathbb R^n\) 上的内积空间
将 \(\mathbb R^n\) 中的每个元素看成数域 \(\mathbb R\) 上的向量,定义 \(\mathbb R^n\) 上的向量加法、向量数乘、内积为
- \((x_1,x_2,\cdots,x_n)+(y_1,y_2,\cdots,y_n)=(x_1+y_1,x_2+y_2,\cdots,x_n+y_n)\)
- \(\lambda (x_1,x_2,\cdots,x_n)=(\lambda x_1,\lambda x_2,\cdots,\lambda x_n)\)
- \((x_1,x_2,\cdots,x_n)\cdot (y_1,y_2,\cdots,y_n)=x_1y_1+x_2y_2+\cdots x_ny_n\)
\(c:\mathcal V\cong\mathbb R^3\)
可以验证如下结论:
- \(c(c^{-1}(x,y,z))+c(c^{-1}(x',y',z'))=(x+x',y+y',z+z')\)
- \(c(\lambda c^{-1}(x,y,z))=(\lambda x,\lambda y,\lambda z)\)
- \(c^{-1}(x,y,z)\cdot c^{-1}(x',y',z')=xx'+yy'+zz'\)
这说明 \(c\) 意义下 \(\mathcal V\) 与 \(\mathbb R^3\) 同构.
欧式空间 \(\mathbb E^n\) 的定义
对定义了内积结构的 \(\mathbb R^n\),我们在其上定义 \(n\) 维欧氏空间,记作 \(\mathbb E^n\).\(\mathbb E^n\) 除了内积结构,其上还可定义其它结构.
\(\mathbb E^3\) 上的外积结构
右手螺旋法则、右手系
(略)
外积的定义
\(\times:\mathbb{E}^3\times\mathbb E^{3}\to \mathbb E^3\) 为 \(\mathbb E^3\) 上的外积,满足如下条件:
- \(|u\times v|\) 等于以 \(u,v\) 为边的平行四边形面积;
- \(u\times v\) 与 \(u,v\) 平面垂直,且 \((u,v,u\times v)\) 满足右手螺旋法则.
外积的性质
- 反对称性:\(u\times v+v\times u=0\).
- 双线性性:分配律成立、数乘线性性成立.
注:由于反对称性,“\(u\times v\times w\) ” 无意义,必须指定运算顺序.
外积恒等式
拉格朗日 (Lagrange) 恒等式
\[ |u\times v|^2=|u|^2|v|^2-(u\cdot v)^2 \]
- 证明思路:依定义直接计算.
BAC-CAB 恒等式
\[ a\times (b\times c)=b(a\cdot c)-c(a\cdot b) \]
- 证明思路(习题16):
- 几何法:先证 \(b\parallel c\) 时成立,再证 \(b\bot c\) 且均为单位向量时成立,最后证明原题.
- 代数法:直接计算.
- 与Jacobi恒等式等价.(习题17)
雅可比(Jacobi)恒等式
\[ a\times (b\times c)+b\times (c\times a)+c\times (a\times b)=0 \]
- 证明思路:用 BAC-CAB恒等式展开.
- 与BAC-CAB恒等式等价.(习题17)
李代数(Lie Algebra)结构
向量空间 \(V\) 上的乘法\(\times:V\times V\to V\)满足反对称性、双线性性、Jacobi恒等式,则称之构成一个李代数结构.因此 \(\mathbb E^3\) 上外积构成一个李代数结构.
外积的坐标公式
取定右手系 \((O;i,j,k)\),由上可以导出 \[ (x_1,y_1,z_1)\times (x_2,y_2,z_2)=\left(y_1z_2-z_1y_2,z_1x_2-x_1z_2,x_1y_2-y_1x_2\right) \] 可记作 \[ (x_1,y_1,z_1)\times (x_2,y_2,z_2)=\left|\begin{matrix}i&j&k\\x_1&y_1&z_1\\x_2&y_2&z_2\end{matrix}\right| \]
混合积与三阶行列式
定义
向量 \(u,v,w\) 张成的平行六面体(定向)体积为(由体积公式可知) \[ V=|u\times v|||w|\cos\theta|=|(u\times v)\cdot w| \] 称 \(V(u,v,w)=(u\times v)\cdot w\) 为向量 \(u,v,w\) 的混合积.
混合积的行列式表示
设向量 \(v_i=(x_i,y_i,z_i)\),则 \[ (u\times v)\cdot w=\left|\begin{matrix}x_1&x_2&x_3\\y_1&y_2&y_3\\z_1&z_2&z_3\end{matrix}\right|. \]
三阶行列式的性质
- 归一化:\(\det I=1\).
- 反交换性:\(\det (u,v,w)=-\det(v,u,w)=-\det(u,w,v)=-\det(w,v,u)\).
- 三重线性性:\(\det (\lambda u+\mu v,a,b)=\lambda\det(u,a,b)+\mu\det(v,a,b)\),对另两个位置同理.
在 \(\mathbb E^3\) 中研究球面几何
只研究 \(S^2\) 上的情形.
球面几何中的基本图形
- 测地线:球面上的大圆(过球心的平面与球面的交线).
- 性质:球面上两点距离最短的连线为测地线.
- 测地线的夹角:球面上两条测地线所在平面的二面角.
- 性质:等于两个大圆在球面上该交点处的切线夹角.
- 球面多边形:球面上多条测地线段(一般取劣弧)所围成的区域.一般指小于半球的区域.
- 球面二角形(球面新月形):球面多边形中边数最少者,由两个测地线围成.
球面几何中的多边形面积
\(S^2\)
\(S^2\) 自身的面积为 \(4\pi\).
球面二角形
设球面二角形中两条测地线段的夹角为 \(\theta\),则该球面二角形的面积为 \(2\theta\).
- 证明:先对有理数分割情况证明,再通过分析学手段证明一般实数情况.
球面三角形:吉拉尔(Girard)定理
球面三角形 \(ABC\) 的面积为 \(\angle A+\angle B+\angle C-\pi\).
- 证明思路:取出各点对径点,对\(\triangle ABC\)和\(\triangle A'BC\)拼在一起得到的球面二角形球面积,同理对另外几对三角形球面积,最后运用球面面积为\(4\pi\)、对径三角形面积相等,解方程即证.
任意球面多边形
设球面 \(n\) 边形的角为 \(\alpha_1,\cdots,\alpha_n\),则其面积为 \(\displaystyle\sum_{i=1}^n\alpha_i-(n-2)\pi\).
- 证明思路:归纳法.
高斯-博内-陈(Gauss-Bonnel-Chern)定理
以上几个结论的超级升级版.你不会以为我要写这个吧?
球面正余弦定理
约定:\(a=\angle BOC, b=\angle COA,c=\angle AOB,A=\angle A,B=\angle B,C=\angle C\).
准备工作:基本的向量乘法结论
\[ \overrightarrow{OA}\cdot \overrightarrow{OB}=\cos c,\quad|\overrightarrow{OA}\times\overrightarrow{OB}|=\sin c \]
\[ \overrightarrow{OB}\cdot \overrightarrow{OC}=\cos a,\quad|\overrightarrow{OB}\times\overrightarrow{OC}|=\sin a \]
\[ \overrightarrow{OC}\cdot \overrightarrow{OA}=\cos b,\quad|\overrightarrow{OC}\times\overrightarrow{OA}|=\sin b \]
准备工作:对偶
称 \(\overrightarrow{OA}\times\overrightarrow{OB}\)、\(\overrightarrow{OB}\times\overrightarrow{OC}\)、\(\overrightarrow{OC}\times\overrightarrow{OA}\) 方向上的单位向量 \(\overrightarrow{OC'}\)、\(\overrightarrow{OA'}\)、\(\overrightarrow{OB'}\) 为对偶向量,球面上三点 \(A'B'C'\) 构成的三角形为\(\triangle ABC\)的对偶三角形.记其三边为 \(a',b',c'\),三个角为\(A',B',C'\).
- 定理:若\(\triangle ABC\) 的对偶为 \(\triangle A'B'C'\),则 \(\triangle A'B'C'\) 的对偶为 \(\triangle ABC\).
- 定理:\(a'+A=b'+B=c'+C=A'+a=B'+b=C'+c=\pi\).
余弦定理 · 第一形式
\[ \cos a=\cos b\cos c+\sin b\sin c\cos A. \]
另两式轮换对称可知.证明如下: \[ \begin{aligned} (\overrightarrow{OA}\times\overrightarrow{OB})\cdot(\overrightarrow{OA}\times\overrightarrow{OC})&\xlongequal{\text{混合积轮换对称性}}\overrightarrow{OA}\cdot(\overrightarrow{OC}\times(\overrightarrow{OA}\times\overrightarrow{OB}))\\&\xlongequal{\text{BAC-CAB}}\overrightarrow{OA}\cdot((\overrightarrow{OC}\cdot\overrightarrow{OB})\overrightarrow OA-(\overrightarrow{OC}\cdot\overrightarrow{OA})\overrightarrow{OB})\\&\xlongequal{\overrightarrow{OA}^2=1}\overrightarrow{OC}\cdot\overrightarrow{OB}-(\overrightarrow{OC}-\overrightarrow{OA})(\overrightarrow{OA}\cdot\overrightarrow{OB}). \end{aligned} \] 而\(LHS=\sin b\sin c\cos A\),\(RHS=\cos a-\cos b\cos c\),即证.
余弦定理 · 第二形式(对偶形式)
\[ \cos A=-\cos B\cos C+\sin B\sin C\cos a. \]
另两式轮换对称可知.对对偶三角形运用第一形式、再转回来可知.
正弦定理 · 第一形式
\[ \sin c\sin b\sin A=|\overrightarrow{OA}\cdot(\overrightarrow{OB}\times\overrightarrow{OC})|=|V(\overrightarrow{OA},\overrightarrow{OB},\overrightarrow{OC})|. \]
另两式由对称可知.证明如下: \[ \begin{aligned} (\overrightarrow{OA}\times\overrightarrow{OB})\times(\overrightarrow{OA}\times\overrightarrow{OC})&\xlongequal[(\overrightarrow{OA}\times\overrightarrow{OB})\cdot\overrightarrow{OA}=0]{\text{BAC-CAB}}((\overrightarrow{OA}\times\overrightarrow{OB})\cdot\overrightarrow{OC})\overrightarrow{OA}\\&\xlongequal{\text{混合积轮换对称性}}(\overrightarrow{OA}\cdot(\overrightarrow{OB}\times\overrightarrow{OC}))\overrightarrow{OA} \end{aligned} \] 两边同取长度即得.
正弦定理 · 第二形式
\[ \dfrac{\sin A}{\sin a}=\dfrac{\sin B}{\sin b}=\dfrac{\sin C}{\sin c}=\dfrac{|V(\overrightarrow{OA},\overrightarrow{OB},\overrightarrow{OC})|}{\sin a\sin b\sin c}. \]
由第一形式两端同除 \(\sin a\sin b\sin c\) 即证.
推论:全等判据
由余弦定理可知:SSS、AAA、SAS、ASA为球面三角形的全等判据.
但是AAS不是!
在球面上建立传统公理休系
定义
- \(S^2\) 上的点为 \(S\)-点,大圆为 \(S-\)直线.
- 介于:设 \(A,B,C\)
为球面上三点,若存在包含 \(A,B,C\)
但严格小于半圆的大圆弧,使得在该圆弧上 \(B\) 按通常意义下介于 \(AC\) 之间,则称 \(B\) 介于 \(AC\) 之间.
- 对径点不讨论介于.
- \(S-\)线段:介于二端点之间点的全体.
- 合同:(略)
与希尔伯特公理的异同
- 关联公理仅 I.2 不成立.(有两个公共点)
- 顺序公理仅 II.2 不成立.(对径点)
- 合同公理全部成立.
- 平行公理、完备公理无法谈论.
\(\mathbb E^3\cong \mathcal X\)
直接计算验证每条公理可证,这里略过.
图形、方程与刚体变换
平面与直线的方程
平面参数方程
基本形式
\[ \begin{cases} x=a_1+tu_1+sv_1\\y=a_2+tu_2+sv_2\\z=a_3+tu_3+sv_3 \end{cases} \]
向量形式
\[ \overrightarrow{OP}=\overrightarrow{OA}+\lambda u+\mu v \]
平面一般方程
基本形式
\[ Ax+By+Cz+D=0 \]
体积形式
\[ (x-a_1,y-a_2,z-a_3)\cdot(u\times v)=0 \]
若给定 \(u=(x_u,y_u,z_u)\),\(v=(x_v,y_v,z_v)\),也可记作
行列式形式
\[ \left|\begin{matrix}x-a_1&y-a_2&z-a_3\\x_u&y_u&z_u\\x_v&y_v&z_v\end{matrix}\right|=0 \]
内积形式
\[ n\cdot\overrightarrow{OP}+D=0 \]
几何意义
- \(n=(A,B,C)\) 为平面的法向量.
- 两个平面平行(或相同)等价于法向量共线(或参数成比例).
直线参数方程
基本形式
\[ \begin{cases} x=a_1+tu_1\\y=a_2+tu_2\\z=a_3+tu_3 \end{cases} \]
向量形式
\[ \overrightarrow{OP}=\overrightarrow{OA}+\lambda v \]
连等形式
\[ \dfrac{x-a_1}{u_1}=\dfrac{y-a_2}{u_2}=\dfrac{z-a_3}{u_3} \]
直线一般方程
基本形式
\[ \begin{cases} Ax+By+Cz+D=0\\ Ex+Fy+Gz+H=0 \end{cases} \]
既约形式
\[ \begin{cases} x+Ay+D=0\\By+z+D'=0 \end{cases} \]
或以其它变量为中心变量轮换.
几何意义
- “两平面之交”
- 设对应的二平面法向量为 \(n_1,n_2\),则 \(n_1\times n_2\) 为直线的一个方向向量.
直线与平面的计算
平面
二平面 \((A_1,B_1,C_1,D_1)\) 与 \((A_2,B_2,C_2,D_2)\) 夹角为 \[ \arccos\dfrac{|A_1A_2+B_1B_2+C_1C_2|}{\sqrt{A_1^2+B_1^2+C_1^2}\sqrt{A_2^2+B_2^2+C_2^2}} \] 证明方法:高考.
点 \((x_0,y_0,z_0)\) 到平面 \((A,B,C,D)\) 的距离为 \[ \dfrac{|Ax_0+By_0+Cz_0+D|}{\sqrt{A^2+B^2+C^2}} \] 证明方法:取平面上一点与已知点连线,求其在平面法向量方向上的投影向量.
二平面\((A,B,C,D)\) 与 \((A,B,C,D')\) (平行平面)的距离为 \[ \dfrac{|D-D'|}{\sqrt{A^2+B^2+C^2}} \]
投影向量的求法:作分解 \[ v=v_\parallel+v_n \] \(v_n\) 为 \(v\) 在法向量上的投影向量, \(v_\parallel\) 为平面上的投影向量.
直线
- 若直线方向向量为 \(u,v\),则 \(u\times v=0\) 当且仅当二直线平行或相同
- 若\(P\) 为直线上一点,\(A\) 为直线外一点,\(u\) 为直线方向向量,则\(A\)到直线距离为 \(\dfrac{|u\times\overrightarrow{AP}|}{|u|}\).
- 设异面直线\(l_1,l_2\),\(A\in l_1,B\in l_2\),则二直线距离为 \(\dfrac{\overrightarrow{AB}\cdot(u\times v)}{|u\times v|}\)
- 二直线夹角 \(\arccos\dfrac{|u\cdot v|}{|u||v|}\)
- 直线方向 \(u\),平面法向量 \(n\),则直线与平面夹角 \(\arcsin\dfrac{|u\cdot n|}{|u||n|}\)
一般图形的方程
用参数方程或一般方程表达.
参数方程
方程为变化规则.
- 必有空间维数条方程.
- 参数个数等于研究对象的维数.
曲线的参数方程
\[ \begin{cases} x=f(t)\\y=g(t)\\z=h(t) \end{cases} \]
曲面的参数方程
\[ \begin{cases} x=f(t,s)\\y=g(t,s)\\z=h(t,s) \end{cases} \]
一般方程
特定情况下,可以将参数消去,得到隐函数方程.
- 有效方程的条数为图形的余维数.
- 余维数与所研究对象的维数之和为空间维数.
曲线的一般方程
\[ \begin{cases} F(x,y,z)=0\\G(x,y,z)=0 \end{cases} \]
曲面的一般方程
\[ F(x,y,z)=0 \]
注:满足条件的不一定是曲面,如方程\((x+y+z)^2+(x-y+z)^2=0\)给出的为一条直线.
二次曲面的一般方程
\[ F(x,y,z):=A_1x^2+A_2y^2+A_3z^2+2B_1xy+2B_2yz+2B_3zx+C_1x+C_2y+C_3z+D=0 \]
几何变换
设 \(X\) 为具有某种几何结构的空间,其上的双射 \(\phi:X\to X\) 为一个几何变换.研究几何变换,主要研究其不变量.
具有平移不变性的几何变换
若 \(\mathbb E^3\) 上的几何变换 \(\phi\) 满足 \[ \overrightarrow{AB}=\overrightarrow{CD}\Rightarrow \overrightarrow{\phi(A)\phi(B)}=\overrightarrow{\phi(C)\phi(D)} \] 则称 \(\phi\) 具有平移不变性.
几何变换诱导的向量变换
对于具有平移不变性的几何变换,可以诱导一个在向量的映射 \[ \tilde{\phi}(\overrightarrow{AB})=\overrightarrow{\phi(A)\phi(B)} \] 这样的两个映射是一一对应的.
等距变换与刚体变换
记 \(d_E(P,Q)=|PQ|\) 为欧氏距离函数,若几何变换\(\phi\)满足 \[ d_E(\phi(P),\phi(Q))=d_E(P,Q) \] 则 \(\phi\) 为一个等距变换.
对等距变换 \(\phi\) ,若其把右手系映为右手系,则称其为一个刚体变换.
刚体变换群\(<\)等距变换群\(<\)变换群
等距变换、刚体变换构成(非Abel)群.且刚体变换群是等距变换群的子群,等距变换群是变换群的子群.
等距变换的不变性
设 \(\phi\) 为一个等距变换,则其具有如下不变性:
- 保直线性:共线三点的像仍共线.
- 保序性:若 \(A,B,C\) 顺次排列于直线,则 \(\phi(A),\phi(B),\phi(C)\) 也顺次排列.
- 保角性:任意三点所成的角与其像所成的对应角相等.
- 平移不变性.
由此可知,等距变换 \(\phi\) 可以诱导一个向量变换 \(\tilde\phi\).
对其诱导的向量变换,有如下不变性:
- 保长度:\(\tilde\phi(u)=u\).
- 保内积:\(\tilde\phi(u)\cdot\tilde\phi(v)=u\cdot v\).
常见的等距变换
平移、旋转、反射均为等距变换,特别地
- 平移、旋转为刚体变换;
- 反射为等距变换,但不为刚体变换.
刚体变换是线性变换
\(\phi\) 为刚体变换, 则 \(\tilde\phi(\lambda u+\mu v)=\lambda\tilde\phi(u)+\mu\tilde\phi(v)\).
刚体变换的代数表达
刚体变换将单位正交基映为单位正交基
设\(\{i,j,k\}\) 为一组单位正交基,则 \(\tilde\phi(\{i,j,k\})=\{f_i,f_j,f_k\}\) 仍构成一组单位正交基.记 \[ f_a=(x_a,y_a,z_a),\quad a\in\{i,j,k\};\quad M=\begin{pmatrix}x_i&x_j&x_k\\y_i&y_j&y_k\\z_i&z_j&z_k\end{pmatrix} \] 则
- \(x_a^2+y_a^2+z_a^2=1\);
- \(x_ax_b+y_ay_b+z_az_b=0\),若 \(a\neq b\);
- \(\det M=1\).
即:\(M\) 为行列式值为 \(1\) 的正交矩阵.
刚体变换的代数表达
对任意刚体变换\(\phi:\mathbb E^3\to\mathbb E^3\),则存在向量 \(a\) 及满足如上条件的矩阵 \(M\),使\(\phi(x)=Mx+a\).
刚体变换\(=\)旋转\(+\)平移
定理:刚体变换可分解为一个平移和一个旋转的复合.证明思路如下:
- 不妨设 \(\phi(O)=O\),否则给其复合一个变换:\(T_{-O'}\),所得的变换仍为刚体变换;
- 引理:若 \(\phi\)
为保持原点不动的刚体变换,则其为旋转变换.证明梗概如下:
- 先证明:若 \(\phi\) 保持某条过
\(O\) 的直线 \(l\) 上所有点不动,则 \(\phi\) 是以一个以 \(l\)为轴的旋转变换.
- 取右手系\((i,j,k)\) 使 \(k\) 为 \(l\) 的方向向量,则 \(k\) 不动;
- 由 \(\tilde\phi\) 保内积,则 \(\tilde\phi(i),\tilde\phi(j)\) 在垂直于 \(l\) 的平面内;
- 求出 $(i) $与 \(i\)的夹角 \(\theta\),验证 \(\tilde\phi(j)\) 与 \(j\) 的夹角为 \(\theta\),从而确定该变换为旋转.
- 再证明:存在过 \(O\)
的直线不动.(存在特征值为 \(1\)
的特征向量)
- 断言:\(\det (M-I)=0\).(利用 \(f_i=f_j\times f_k\) 及其轮换,展开证明)
- 因此 \((x_i-1,y_i,z_i)\),\((x_j,y_j-1,z_j)\),\((x_j,y_j,z_j-1)\) 共面.
- 取其一个法向量 \(n\),验证 \(\phi(n)=n\)
- 先证明:若 \(\phi\) 保持某条过
\(O\) 的直线 \(l\) 上所有点不动,则 \(\phi\) 是以一个以 \(l\)为轴的旋转变换.
- 由引理可知得证.
推论:全体保持原点不动的旋转变换构成刚体变换群的一个子群.(特殊正交群\(SO_3\), 非交换)
基于几何变换的图形分类
等价关系与等价类
(我觉得这是代数)
准备工作:仿射变换下不改变曲线次数
零点集
\(F=F(x_1,\cdots,x_n)\) 为 \(n\) 元 \(d\) 次多项式,记 \(F\) 的零点集为 \[ Z_F=\{(x_1,\cdots,x_n)\mid F(x_1,\cdots,x_n)=0\} \]
多项式集
\(X_{n,d}=\{Z_F\mid F\in \mathbb R[x_1,\cdots,x_n],\deg F=d\}\)
仿射变换
\(A\)为\(n\times n\)可逆矩阵,则 \(\phi(x)=Ax+a\) 为仿射变换.
变换下的零点集引理
\(\phi:\mathbb E^n\to\mathbb E^n\) 为仿射变换,则\(\phi(Z_F)=Z_{F\circ \phi^{-1}}\).
- 证明思路:\(\phi(Z_F)=\{\phi(x_1,\cdots,x_n)\mid F(x_1,\cdots,x_n)=0\}=\{(x_1,\cdots,x_n)\mid F\circ \phi^{-1}(x_1,\cdots,x_n)=0\}\)
定理:仿射变换不改变多项式次数
\(\phi:\mathbb E^n\to\mathbb E^n\) 为仿射变换,则\(\deg F=\deg (F\circ \phi)\).
- 证明思路:显然 \(\deg(F\circ\phi)\leqslant \deg F\).故\(\deg F=\deg (F\circ \phi\circ \phi^{-1})\leqslant \deg(F\circ\phi)\leqslant \deg F\).
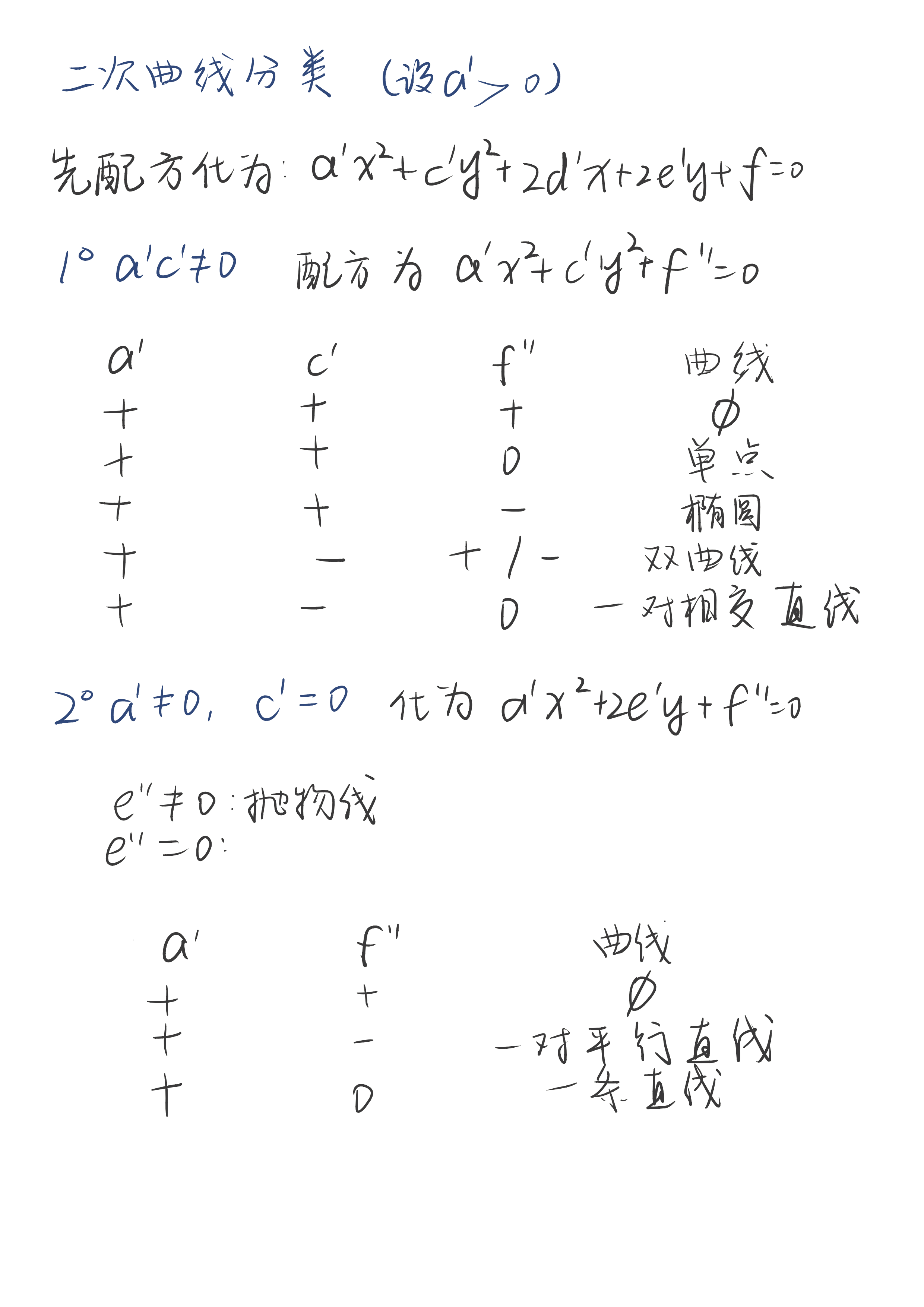
二次曲线的8种等价类
思想
写出方程,消去 \(xy\) 项系数(这一步用到上面的结论),之后往死里分类讨论.
结论
- 空集;
- 椭圆;
- 独点集;
- 双曲线;
- 一对相交直线;
- 抛物线;
- 一对平行线;
- 一条直线.
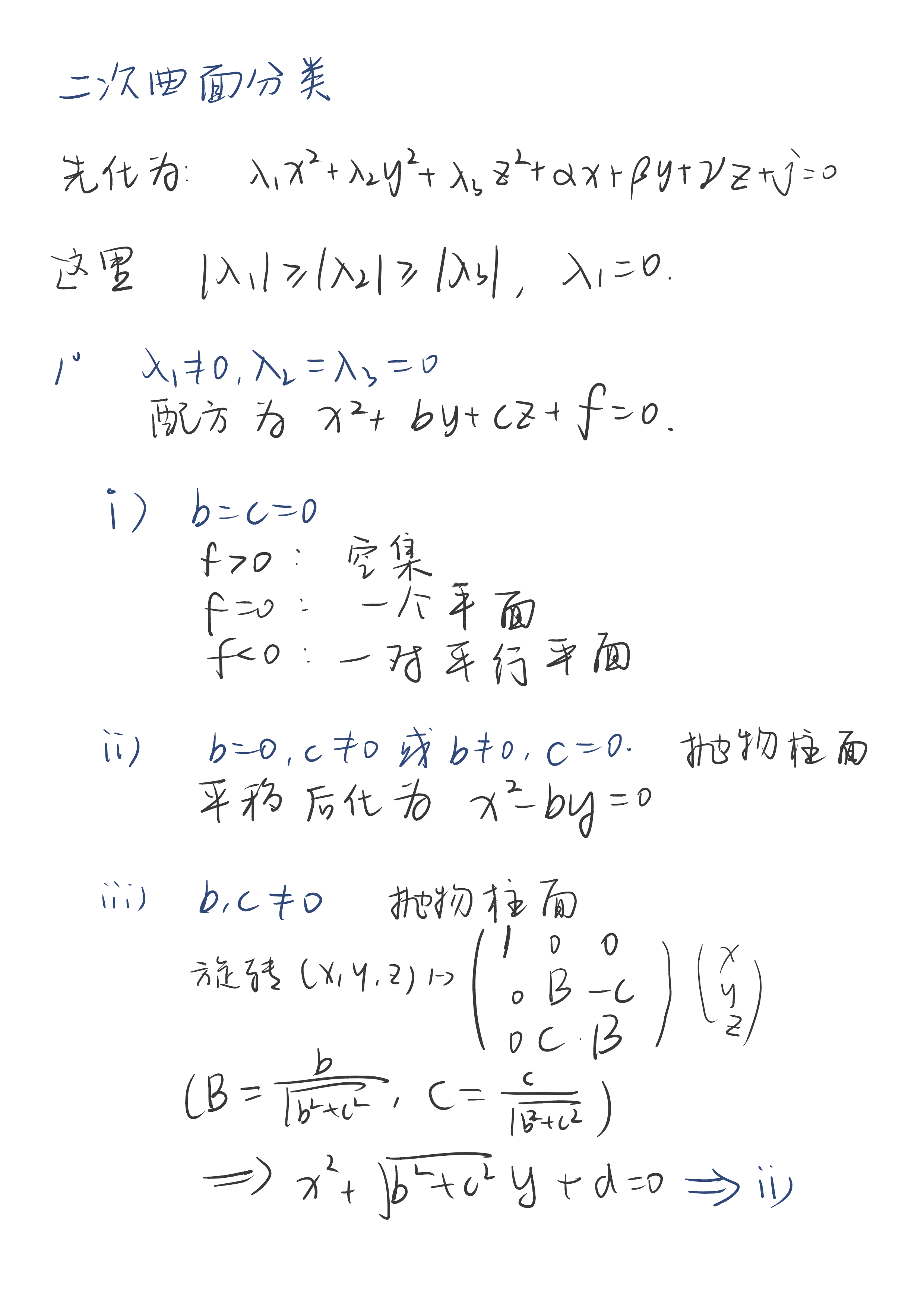
二次曲面的15种等价类
结论
- 空集;
- 基本元素系列:
- 点
- 线
- 面
- 一对平行平面(\([x^2-a=0],a>0\))
- 一对相交平面(\([x^2-ay^2=0],1\geqslant a>0\))
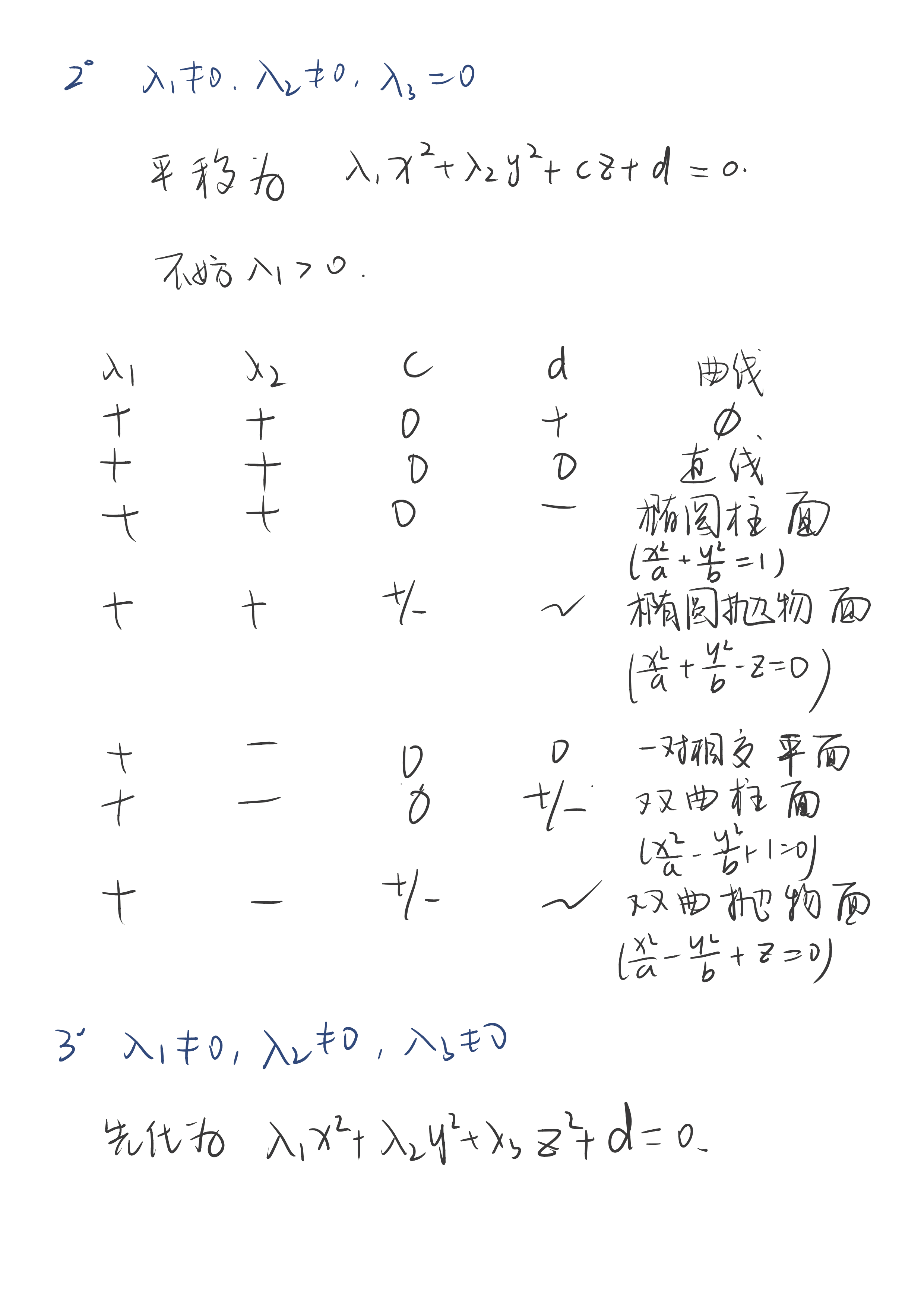
- 柱体系列:
- 抛物柱面(\([x^2-ay=0],a>0\))
- 椭圆柱面(\(\left[\dfrac{x^2}{a}+\dfrac{y^2}{b}-1=0\right],a\geqslant b>0\))
- 双曲柱面(\(\left[\dfrac{x^2}{a}-\dfrac{y^2}{b}+1=0\right],a,b>0\))
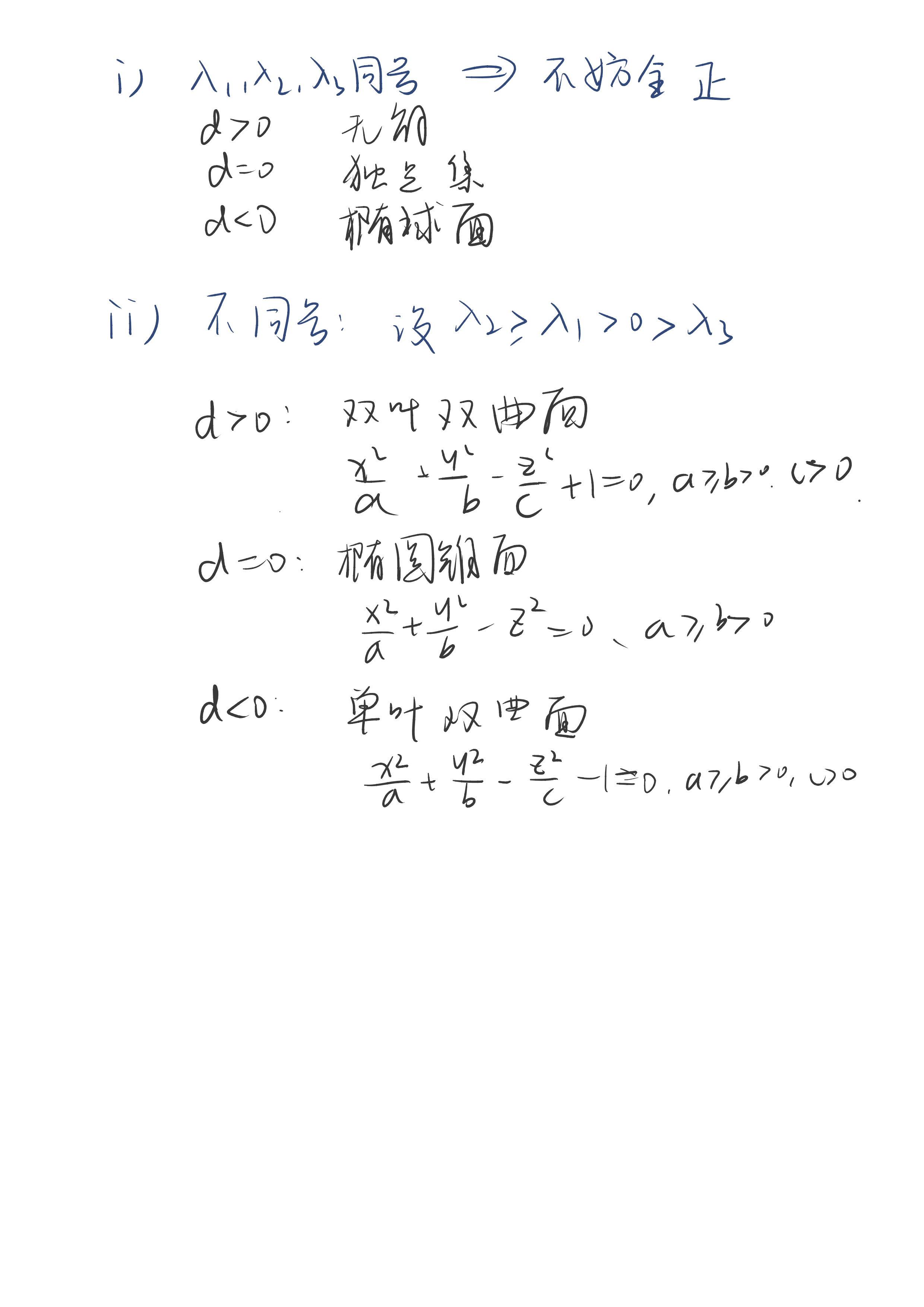
- 椭圆锥面(\(\left[\dfrac{x^2}{a}+\dfrac{y^2}{b}-z^2=0\right],a\geqslant b>0\))
- 椭球面(\(\left[\dfrac{x^2}{a}+\dfrac{y^2}{b}+\dfrac{z^2}{c}-1=0\right],a\geqslant b\geqslant c>0\))
- 双曲面系列:
- 单叶双曲面(\(\left[\dfrac{x^2}{a}+\dfrac{y^2}{b}-\dfrac{z^2}{c}-1=0\right], a\geqslant b>0,c>0\))
- 双叶双曲面(\(\left[\dfrac{x^2}{a}+\dfrac{y^2}{b}-\dfrac{z^2}{c}+1=0\right], a\geqslant b>0,c>0\))
- 抛物面系列:
- 椭圆抛物面(\(\left[\dfrac{x^2}{a}+\dfrac{y^2}{b}-z=0\right],a\geqslant b>0\))
- 双曲抛物面(\(\left[\dfrac{x^2}{a}-\dfrac{y^2}{b}+z=0\right],a,b>0\))
以上给出的各方程称为对应图形的标准形式.
标准方程记法:
- 1、2系列自己写.
- 3系列就是圆锥曲线标准方程.
- 4系列:平方项全出,无一次项和常数项
- 5、6系列:平方向全出,带常数项,单叶减双叶加
- 7系列:带\(x,y\)二次项、\(z\)一次项,\(y,z\)前系数反号
或
- 椭圆系列加\(y^2\)减低次项,双曲线系列减\(y^2\)加低次项
- 抛物线必出一次项,永远是最后一个
- 平直的东西,变元和常数加在一起不超过三个
判定方法
懒得敲了,直接图片.
不知道为什么,知乎图床炸了,这里传一份pdf:
几何学基础 下半复习纲要
注:
- 本笔记中的 \(\{x\in S:P(x)\}\)及 $ {xSP(x)}$ 均为集合的描述法表示,仅在比号太多时使用后者.
- 出于作者的考量,本笔记中会出现一些作者个人习惯的写法,可能与书上有出入,读者注意.
- 另:有关射影几何的部分,建议参考我的助教 @Kaede 的射影几何学习笔记系列.
几何与变换
埃尔朗根纲领
- 观点:几何是研究对称群上不变量
- 几何的中心问题:给定流形及其中的一个变换群,研究流形中几何形体在这个群的变换下保持不变的性质
- 框架(克莱因):射影几何
\(\mathbb E^2\)上的几何与变换群
约定概念
- 变换:空间 \(X\) 到自身的双射 \(\phi:X\stackrel{\text{1:1}}{\longrightarrow}X\)
- 线性变换:向量空间上保线性结构不变的变换,即满足
\(\phi(\lambda u+\mu
v)=\lambda\phi(u)+\mu\phi(v),\ u,v\in X,\ \lambda,\mu\in\mathbb
R\) 的变换
- 注:旋转轴过原点的变换为线性变换,一般的平移变换不是线性变换.
- 变换群:由变换构成的群(非 Abel,容易验证前三条公理成立)
线性变换的新描述
\(\mathbb R^2\) 上的线性变换往往可以描述为 \[ \phi: v\mapsto Av+u \] 这里 \(A\) 为 \(2\times 2\) 矩阵,\(v,u\) 为二维列向量,但这一记法并不好用.注意到对二维列向量 \(u, v\), \[ \pmatrix{v\\1}_{1\times 3}\mapsto \pmatrix{A&u\\0&1}_{1\times 3}\pmatrix{v\\1}_{3\times 3}=\pmatrix{v'\\1}_{1\times 3} \] 正好满足 \(v'=Av+u\),这就给出了一种「用三维矩阵描述二维变换」的新描述方式.
刚体变换的新描述
回顾:过去的描述
在 \(X=\mathbb E^2\) 上,可以定义刚体变换群 \[ G_{刚体}=\{\phi:\mathbb E^2\to\mathbb E^2\mid\phi 是一个刚体变换\} \] 回忆:任一刚体变换 \(\phi\) 可唯一表示为 \[ \phi_{A,u}v=Av+u,\quad A=\pmatrix{\cos\theta&-\sin\theta\\\sin\theta&\cos\theta}, \theta\in\mathbb R;\; u=\pmatrix{x_0\\y_0} \]
线性变换群下的观点
- 特殊欧氏群:\(SE(2):=\left\{\pmatrix{A&u\\0&1}\in GL(3): A\in SO(2), u\in\mathbb E^2\right\}\)
- 定理:存在自然同构 \(G_{刚体}\cong SE(2)\),自然同构\(f:
\phi_{A,u}\mapsto\pmatrix{A&u\\0&1}_{3\times 3}\).
- 先验证 \(f\) 为群同态,再由「过去描述」中唯一表示得到双射
等距变换的新描述
类似刚体变换,引入欧氏群: \(E(2):=\left\{\pmatrix{A&u\\0&1}\in GL(3): A\in O(2), u\in\mathbb E^2\right\}\)
性质:
- 存在自然同构 \(G_{等距}\cong E(2)\)
- \(SE(2)\lneq E(2)\),\([E(2):SE(2)]=2\)
旋转变换的新描述
同理可得:\(G_{旋转}\cong SO(2)\),\(G_{旋转反射}\cong O(2)\),这里「旋转反射」群由保持原点不动的等距变换组成.
想法:\(SO(2)\) 中的元素可不可以用一个奇异视角 「\(\pmatrix{A&0\\0&1}_{3\times 3}\)」来看呢?
以下引入一个记号:\(ROT(2)=\left\{\pmatrix{A&0\\0&1}: A\in SO(2)\right\}\). 读者应注意该符号不是书中标准记号,考试勿写.
借助以上引入的记号,可以说明:\(G_{旋转}\cong ROT(2)\).且 \(ROT(2)\lneq SE(2)\lneq E(2)\).
相似变换的新描述
回顾:过去的描述
相似变换可唯一表示为 \[ \phi_{\lambda,A,u}v=\lambda Av+u,\quad A\in O(2),\ u\in\mathbb E^2, \lambda\in\mathbb R_{>0} \]
新描述
- 线性共形群:\(CO(2)=\{\lambda A:\lambda\in\mathbb R_{>0},\; A\in O(2)\}\)
- 相似变换群的线性变换群:\[SIM(2)=\left\{\pmatrix{A&u\\0&1}: A\in CO(2),u\in\mathbb E^2\right\}\]
- 同理:\(G_{相似}\cong SIM(2)\).
相似变换的不变量
- 保角
- 保距离比
仿射变换的几何
引入
\(\mathbb E^2\)上最大的线性变换群为一般线性群\(GL(2)\),对应的变换群为 \(AFF(2)=\left\{\pmatrix{A&u\\0&1}: A\in GL(2), u\in\mathbb E^2\right\}\)
存在线性变换群 \(G_{仿射}\cong AFF(2)\),这样的变换称为仿射变换:\(\phi_{A,u}v=Av+u\).
仿射变换的不变量
- 保平行:\(PQ\parallel RS\Rightarrow\phi(P)\phi(Q)\parallel\phi(R)\phi(S)\);
- 保简比(平行线段长度比):若\(PQ\parallel RS\)或四点共线,则\(\dfrac{|PQ|}{|RS|}=\dfrac{|\phi(P)\phi(Q)|}{|\phi(R)\phi(S)|}\);
- 保面积比:存在常数 \(C\) 使 \(S_{\triangle PQR}=CS_{\triangle\phi(P)\phi(Q)\phi(R)}\).
证明方法如下:
- 由\(PQ\parallel RS\),得\(\overrightarrow{PQ}=\lambda\overrightarrow{RS}\),用平移不变性直接计算变换后发现 \(\lambda\) 不变.
- 通过行列式性质计算面积.
总览
\[ \begin{matrix} G_{旋转}&\cong&ROT(2)\\ \wedge&&\wedge\\ G_{刚体}&\cong&SE(2)\\ \wedge&&\wedge\\ G_{等距}&\cong&E(2)\\ \wedge&&\wedge\\ G_{相似}&\cong&SIM(2)\\ \wedge&&\wedge\\ G_{仿射}&\cong&AFF(2)\\ \end{matrix} \]
| 变换类型 | 对称群 | 不变量 |
|---|---|---|
| 旋转变换 | \(ROT(2)\)(书中为 \(SO(2)\)) | 距离、定向、到原点距离 |
| 刚体变换 | \(SE(2)\) | 距离、定向 |
| 等距变换 | \(E(2)\) | 距离 |
| 相似变换 | \(SIM(2)\) | 角度、长度比 |
| 仿射变换 | \(AFF(2)\) | 平行性、简比、面积比 |
| TO | BE | CONTINUED |
射影几何与射影变换
射影空间
定义
\(\mathbb R^n\backslash\{0\}\) 上的等价关系:\(A\sim_n B\stackrel{\text{def}}{\Longleftrightarrow}\overrightarrow{OA}\parallel\overrightarrow{OB}\) (一般记作 \(\sim\) 即可).
\(n\) 维射影空间:\(\mathbb{RP}^n:=\bigl(\mathbb R^{n+1}\backslash\{0\}\bigr)/\sim_{n+1}\).
齐次坐标:\(n\) 维射影空间上的点记作 \((x_1:x_2:\cdots:x_n):=[(x_1,x_2,\cdots,x_n)]\),\([\cdot]\)表示商集的等价类.
\(\mathbb R^n\) 到 \(\mathbb{RP}^n\) 的自然映射:\(\varphi:\mathbb R^n\to \mathbb{RP}^n,\; (x_1,x_2,\cdots,x_n)\mapsto (x_1:x_2:\cdots:x_n:1)\).
- 该映射为单射,但不为满射.
无穷远空间:空间 \(\mathbb{RP}^n\backslash\varphi(\mathbb R^n)\) .
- 容易验证:无穷远空间是一个维度低一维的射影空间.
无穷远点:无穷远空间中的点.
性质
\(\mathbb{RP}^n\) 的分解:记
\(\mathcal R_m:=\{(\underbrace{x_1:x_2:\cdots:x_m}_{m项}:{\color{blue}1}:\underbrace{0:0:\cdots:0}_{n-m-1项})\in\mathbb{RP}_n\mid (x_1,x_2,\cdots,x_m)\in\mathbb R^m\}\subset \mathbb{RP}^n\)
\(\mathcal{RP_m}:=\{(\underbrace{x_1:x_2:\cdots:x_m}_{m项}:{\color{red}0}:\underbrace{0:0:\cdots:0}_{n-m-1项})\in\mathbb{RP_n}\mid (x_1:x_2:\cdots:x_m)\in\mathbb{RP}^m\}\subset \mathbb{RP}^n\)
则我们有
- \(\displaystyle\mathbb{RP}^n=\mathcal{RP}_{n}=\mathcal R_n\sqcup \mathcal{RP}_{n-1}\);
- \(\displaystyle \mathbb{RP}^n=\bigsqcup_{m=0}^n\mathcal R_m\).
书中直接使用双线字体,个人认为容易引起误导,故这里换用字体.
球面商模型:\(\mathbb{RP}^n\cong S^n/\{\pm 1\}\).
几何模型
- 投影模型:将过 \(\mathbb R^{n+1}\)
空间中原点的直线 \(l\) 视作一个点.
- 或递归定义:过原点的直线 \(l\) 与 \(\mathbb{RP}^{n-1}\) 子空间 \(\{x_n=1\}\) 的交点
- 球面商模型:将「圆的每组对径点粘合」形成的空间.
以下非书中标准内容,仅个人学习体会及方便笔记书写使用.
射影空间中的多项式曲面
设 \(\mathcal{\bar{F}}\subset\mathbb R[x_1,\cdots,x_{n+1}]\) 为一族定义在 \(\mathbb R\)上的 \(n+1\) 元齐次多项式,则 \[ \overline X_{\mathcal{\bar F}}:=\{(x_1:x_2:\cdots:x_{n+1})\in\mathbb{RP}^n\mid \forall \bar F\in\mathcal {\bar{F}},\bar F(x_1,\cdots,x_{n+1})=0\} \] 构成 \(\mathbb{RP}^n\) 上的一个多项式曲面.
这里「齐次」的要求是为了保证良定性.
\(\mathbb R^n\)上多项式曲面的坐标齐次化/射影化
\(n\) 元多项式的坐标齐次化
设 \(n\) 元多项式 \(F\in \mathbb R[x_1,\cdots,x_n]\),映射 \[ \mathscr{Q}: \mathbb R[x_1,\cdots,x_n]\to \mathbb R[x_1,\cdots,x_{n+1}],\quad F(x_1,\cdots,x_n)\mapsto x_{n+1}^{\deg F}F\left(\dfrac{x_1}{x_{n+1}},\cdots,\dfrac{x_n}{x_{n+1}}\right) \] 称为该多项式的坐标齐次化.记\(\bar F(x_1,\cdots,x_{n+1})=x_{n+1}^{\deg F}F\left(\dfrac{x_1}{x_{n+1}},\cdots,\dfrac{x_n}{x_{n+1}}\right)\),容易验证其为齐次多项式.
\(n\) 维曲面的射影化
设 \(\mathbb R^n\) 上的多项式曲面为 \[ X_{\mathcal F}=\{(x_1,x_2,\cdots,x_{n})\in\mathbb{R}^n: \forall F\in\mathcal {F}\subset\mathbb R[x_1,\cdots,x_n], F(x_1,\cdots,x_{n})=0\} \] 记 \(\bar F=\mathscr{Q}(\mathcal F)\), \(\overline{X}_{\bar F}\) 称为曲面 \(X_{\mathcal F}\) 的射影化.
射影平面 \(\mathbb{RP}^2\) 上的直线与二次曲线
直线
定义
- 定义:射影平面上的直线定义为平面上的直线的射影化.
- 即 \(l_{(A,B,C)}:\{(x:y:z)\in\mathbb{RP}^2\mid Ax+By+Cz=0\}\),这里 \((A,B,C)\in\mathbb R^3\backslash\{0\}\).
- 可用向量 \((A,B,C)\) 唯一表示.
- 对直线 \(l\),若其射影化的原象 \(\mathscr Q^{-1}(l)\) 存在,则记作 \(l^0\).
- 良定性: \(u\parallel v \Leftrightarrow l_u=l_v\).
- 无穷远直线:所有的无穷远点位于直线 \(l_\infty:=\{(x:y:z)\in\mathbb{RP}^2\mid z=0\}=\mathcal R_1\) 上.
性质
两点关联唯一一条直线.
- 包括无穷远点.
两线关联唯一一点.
- 因此,平行概念不存在.
- 若 \(l_u\cap l_v=\{P\}\),则 \(P=[u\times v]\).
对偶原理:\(l_{(A,B,C)}\) 与 \((A:B:C)\) 可建立同构.这一点源自于「解方程的性质」.
二次曲线
定义
- 定义:射影平面上的二次曲线定义为平面上二次曲线的射影化.
- \(\mathbb{RP}^2\) 上的方程描述: \(\bar F(x,y,z):=Ax^2+By^2+Cz^2+2Dxy+2Exz+2Fyz\),\(\overline X_{\{\bar F\}}\) 为 \(\mathbb{RP}^2\) 上的二次曲线.
- 矩阵乘法描述:\(F(x,y,z)=\pmatrix{x&y&z}C\pmatrix{x\\y\\z}\),其中系数矩阵 \(C=\pmatrix{A&D&E\\D&B&F\\E&F&C}\neq 0\).
性质
椭圆、抛物线、双曲线完成了统一:在射影意义下为同一二次曲线,只是相对于无穷远直线位置不同.
- 椭圆:相离
- 抛物线:相切
- 双曲线:相交
射影变换介绍
定义
\(\forall A\in GL(3,\mathbb R)\),\(\phi_A: \mathbb{RP}^2\to\mathbb{RP}^2,\ [v]\mapsto [Av]\) 给出了一个射影变换,且 \(\phi_A=\phi_B\)当且仅当\(A=\lambda B\)(\(\lambda\neq 0\)).
良定性验证:\(\phi_A(\lambda x,\lambda y,\lambda z)=\lambda\phi_A(x,y,z)\),两边同取 \([\cdot]\) 即得.
射影变换群:\(G_{射影}=\{\phi_A: A\in GL(3,\mathbb R)\}\).
保共线性(线性变换共性)
容易验证:\(\phi_B\circ\phi_A=\phi_{BA}\).
与仿射变换的关系
\(G_{仿射}\lneq G_{射影}\).
仿射变换是保无穷远直线不动的变换
- 但不保证每个无穷远点不动:要求平行线方向不变
- 每个仿射变换对应的射影变换:\(\pmatrix{x\\y\\z}\mapsto A\pmatrix{x\\y\\z}\)(\(\mathbb R^2\)上的写法中我们设定了 \(z=1\),这下知道原因了吧)
- 事实上,\(G_{仿射}\cong G_\infty\):保无穷远直线的射影变换子群.
一般地,\(X\) 为一集合,对 \(X\) 上的一个变换群 \(G\) 及 \(X\) 的一个子集族 \(\mathcal Y\), \(G_\mathcal Y(X)=\{f\in G: f(Y)=Y, \forall Y\in\mathcal Y\}< G\).
射影变换的一般位置定理
\(\mathbb{RP}^2\)上的一般位置定义
若四点中任意三点不共线,则称其为一般位置的点;若四线中任意三线不共点,则称其为一般位置的直线.
\(\mathbb{RP}^2\)上的一般位置定理
设 \(P_i\ (i=1,2,3,4)\) 为 \(\mathbb{RP}^2\) 上位于一般位置的四点,则存在唯一的射影变换 \(\phi\) 使 \[ \phi(P_1)=(1:0:0),\ \phi(P_2)=(0:1:0),\ \phi(P_3)=(0:0:1),\ \phi(P_4)=(1:1:1) \]
证明
存在性.事实上,设 \(P_i=[v_i]\),并记 \(P=\mathcal M(v_1^T,v_2^T,v_3^T)\)(以 \(v_1,v_2,v_3\) 的列向量形式为列向量的矩阵),记行向量 \(u=(P^{-1}v_4^T)^T\),\(Q=\operatorname{diag} u\)(以行向量 \(u\) 的各位置元素组成的对角矩阵),则 \(\phi: v\mapsto Q^{-1}P^{-1}v\) 满足要求.这是因为 \[ Q^{-1}P^{-1}\mathcal{M}(v_1^T,v_2^T,v_3^T,v_4^T)=\pmatrix{x^{-1}&0&0&1\\0&y^{-1}&0&1\\0&0&z^{-1}&1} \] 这里 \(u=(x,y,z)\).
唯一性.暴力计算 \(\phi_1\phi_2^{-1}\)的变换矩阵.
注
以上给出了该变换的计算方法:
- 先将前三个点的坐标排成 \(3\times 3\) 矩阵 \(P\) 的每一列;
- 再计算 \(P^{-1}\);
- 然后将第四个点的坐标排成列向量 \(v\),计算 \(P^{-1}v\),得到列向量 \(u\);
- 设 \(u=(x,y,z)\),定义对角矩阵 \(Q=\operatorname{diag}(x,y,z)\);
- 最后,\(\phi:v\mapsto Q^{-1}P^{-1}v\) 即为所求的变换.
除此之外,这一命题的对偶:直线版一般位置定理也成立.对该命题作对偶即可得到.
推论
对于 \(\mathbb{RP}^2\) 中任意两组处于一般位置的点 \(P_i\)、\(Q_i\),存在唯一的射影变换 \(\phi\) 使 \(\phi(A_i)=B_i\).
二次曲线的射影分类
在射影变换诱导的等价关系下,二次曲线有且仅有以下几种:
- 空集;
- 点;
- 直线;
- 两条相交直线;
- 非退化二次曲线.
交比:射影变换的不变量
\(\mathbb{RP}^1\)上的分式线性变换
设 \(\phi: (x:y)\mapsto (ax+by:cx+dy)\) 为 \(\mathbb{RP}^1\) 上的射影变换.若\(y\neq 0\),\(\dfrac{x}{y}+\dfrac{d}{c}\neq 0\),记\(t=\dfrac{x}{y}\),则 \(\phi(t:1)=\left(\dfrac{at+b}{ct+d}:1\right)\).事实上把 \(t\in\mathbb R\) 映射到分式 \(\dfrac{at+b}{ct+d}\).
定义:\(\phi(t)=\dfrac{at+b}{ct+d}\) 称为分式线性变换.
性质:每一个 \(\mathbb{RP}^1\)上的射影变换一一对应于一个分式线性变换.
- 对分式线性变换延拓到射影变换的方法:若\(c\neq0\),将 \(t=-d/c\) 映到无穷远点;若 \(c=0\),该变换正是仿射变换.
交比
对互不相同的四个「射影实数」 \(t_1,t_2,t_3,t_4\in \mathbb R\cup\{\infty\}\),定义交比为\[(t_1,t_2;t_3,t_4):=\dfrac{(t_3-t_1)(t_4-t_2)}{(t_4-t_1)(t_3-t_2)}\].
注:本课程教科书中官方的交比记号是\(\color{red}R(t_1,t_2,t_3,t_4)\),上面给的写法是我个人高中搞竞赛的时候习惯的写法,这里出于习惯就直接写了.
题外话:记得之前在一个回答中说过,交比可以是\([a,b;c,d]\),可以是\((a,b;c,d)\),可以是\((a,b,c,d)\),可以是\([a,b,c,d]\),可以是\((abcd)\),可以是\([abcd]\)(这个常有歧义而不常用),我以为已经够多了,结果这本书又冒出来一个新记号?
对 \(\mathbb{RP}^1\) 上的四点 \(A,B,C,D\),记其坐标为\((x_p:1)\),则其交比为\((A,B;C,D)=\dfrac{(x_c-x_a)(x_d-x_b)}{(x_d-x_a)(x_c-x_b)}\).一般的公式请自行通分.
射影变换保交比
一个\(\mathbb{RP}^1\)上的变换保交比当且仅当其为射影变换.
定理:保交比映射三点不动即恒等
若 \(\mathbb{RP}^1\) 上保交比的变换有三个不动点,则其为恒等变换.
证明.\(\forall P\),\((P,A;B,C)=(\phi(P),\phi(A);\phi(B),\phi(C))=(\phi(P),A;B,C)\).
射影参数化:推广到 \(\mathbb{RP}^2\) 上
定义
称 \(\varphi:\mathbb{RP}^1\to\mathbb{RP}^2,\quad (u:v)\mapsto(x(u,v):y(u,v):z(u,v))\)——\(x,y,z\) 为关于\(u,v\) 的二元齐一次多项式——为直线 \(ax+by+cz=0\)的一个射影参数化或射影坐标映射,若\(\forall v\in\mathbb{RP}^1\),有\(ax(v)+by(v)+cz(v)=0\).
- 理解:想「参数方程」.
- 注:事实上,\(\varphi\) 为一个双射.
- 同一条射影直线的参数化不唯一.
性质
若\(\phi_1,\phi_2\)是射影直线 \(l\) 的两个射影参数化,则 \(\phi_2\circ\phi_1^{-1}\) 是\(\mathbb{RP}^1\) 上的一个射影变换.
证明思路.不妨设 \(l:x+by+cz=0\), 找一个特定的参数化\(\phi_3=(y:z)\)中转.
直线上的交比
由上述性质可知:对射影直线 \(l\subset\mathbb{RP}^2\) 上相异的四点 \(A,B,C,D\),以及 \(l\) 的任意射影参数化 \(\phi\),\((\phi^{-1}(A),\phi^{-1}(B);\phi^{-1}(C),\phi^{-1}(D))\) 不依赖于 \(\phi\) 的选取.定义其为这四点(构成的点列)的交比\((A,B;C,D)\).
\(\mathbb{RP}^2\) 上射影变换的不变量
定义:完全四边形
四根射影直线及其两两相交交成的六个点构成的图形.
定理
一个变换 \(\phi:\mathbb{RP}^2\to\mathbb{RP}^2\)是射影变换当且仅当其保直线、保交比.
证明
- \(\Rightarrow\):
- 保直线性显然.
- 保交比:固定一个射影坐标即可.
- \(\Leftarrow\):
- 设 \(\phi\) 将 \(x=0\) 映为 \(l_1\),将 \(y=0\) 映为 \(l_2\),将\(z=0\) 映为 \(l_3\),将 \(x+y+z=0\) 映为 \(l_4\);
- 由一般位置定理的直线形式:取射影变换 \(\phi_1\)将 \(x=0\) 映为 \(l_1\),将 \(y=0\) 映为 \(l_2\),将\(z=0\) 映为 \(l_3\),将 \(x+y+z=0\) 映为 \(l_4\);
- 考虑映射:\(\psi=\phi_1^{-1}\circ\phi\),则 \(\psi\) 保交比、直线,且将 \(x=0\)、\(y=0\)、\(z=0\)、\(x+y+z=0\) 映为自身;
- 考虑这四根直线构成的完全四边形,该完全四边形的六个顶点为不动点;
- 由保交比映射三点不动即恒等:在这四条直线上,该变换为恒等映射;
- 因此平面上的所有直线与这四条直线的交点都不动,同上可知这些直线上变换都为恒等映射;
- 因此该变换为恒等变换.即\(\phi_1=\phi\),故\(\phi\)为射影变换.
古典射影几何小品
古典射影几何中的定理
Pappus定理、Pascal定理、Desargues定理、Brianchon定理.
古典射影几何的公理体系
定义:完全四点形
处于一般位置的四个点中,任意三点不共线,则称由这四个点及其两两连接形成的六条直线组成一个完全四点形.
- 顶点:这四个点
- 边:这六条直线
- 对边:无公共顶点的边
- 对边点:对边的交点
射影平面公理
- 任意不同的两点根唯一一条直线关联.
- 任意不同的两条直线跟至少一个点关联.
- 存在四个点,其中任意三个不共线.
- 法诺公理:完全四点形的三个对边点不共线.
- 帕普斯公理:Pappus定理成立.即:若六边形的六个顶点交替出现在两条直线上,则三组对边的交点共线.
注:由公理1与公理2,立得任意不同的两条直线恰好与唯一一点关联.
古典射影几何的对偶性原理
对偶命题
在射影平面中,「点」与「直线」对偶:对于射影平面的定理,将其以下描述互换:
- 直线、点;
- 包含、属于;
- 连接、相交;
- 共线、共点;
- ……
则所得命题称为原命题的对偶命题.
对偶性原理
若一个定理可由射影平面公理推出,则其对偶定理也成立.
证明思路.验证以上五条公理组成体系可以推出其自身的五条对偶命题.
拓扑学科不普
没科普,略.